Slam Mapping Ros – We are currently not creating a SLAM based Radar demo, however it is very possible to create an intensity based mapping. If you go to the source of the ROS Driver, there is a file called . SLAM (simultaneous localization and mapping) is the method computers use to perceive their environment. In user experience (UX) design, it is most relevant to AR .
Slam Mapping Ros
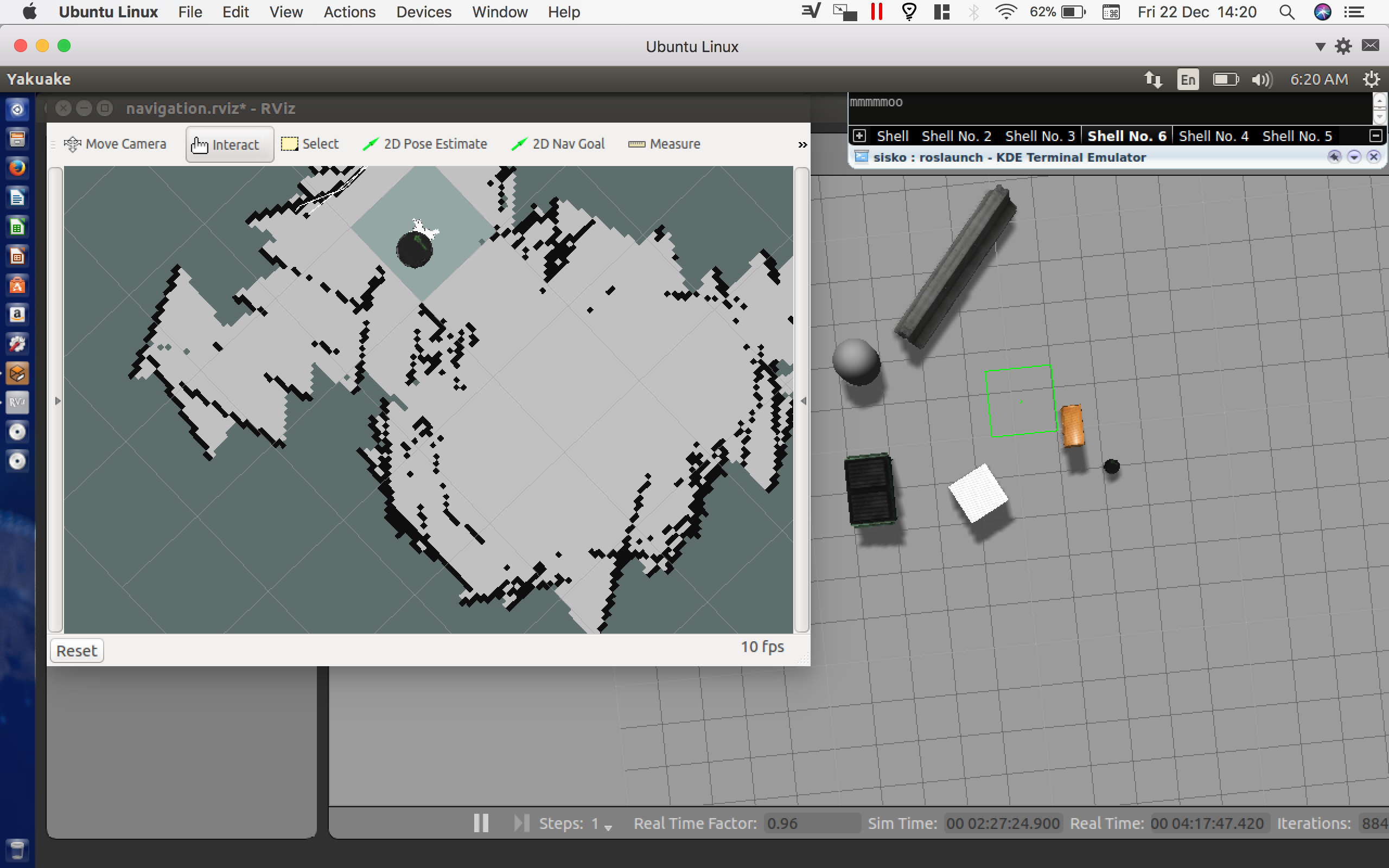
Source : answers.ros.org
Giving LaMa a shot
Source : msadowski.github.io
How to Build an Indoor Map Using ROS and LIDAR based SLAM
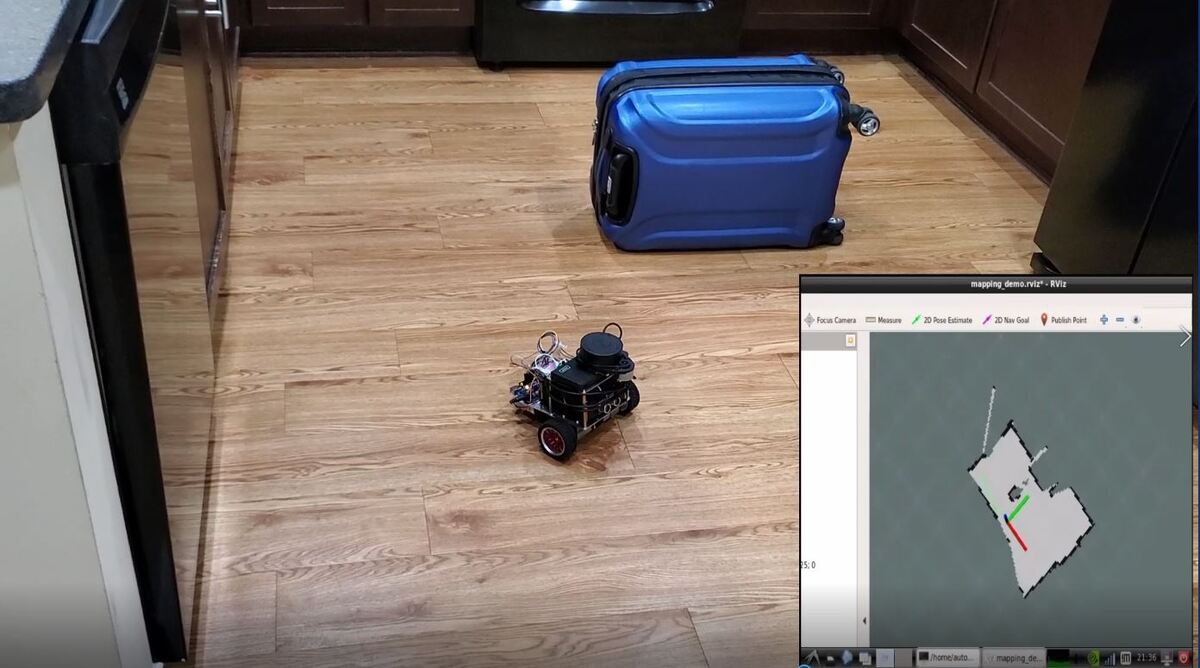
Source : automaticaddison.com
problem building my map using SLAM ROS Answers: Open Source Q&A

Source : answers.ros.org
Structure of the robot localization application. SLAM

Source : www.researchgate.net
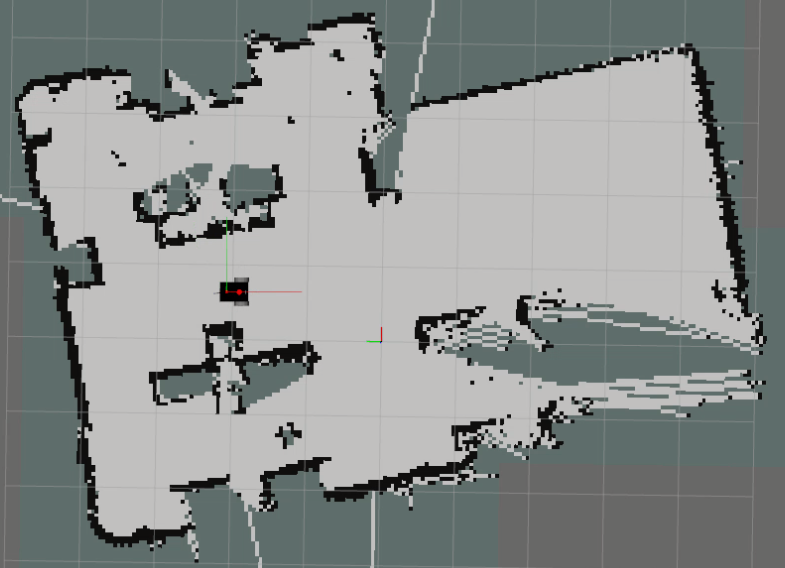
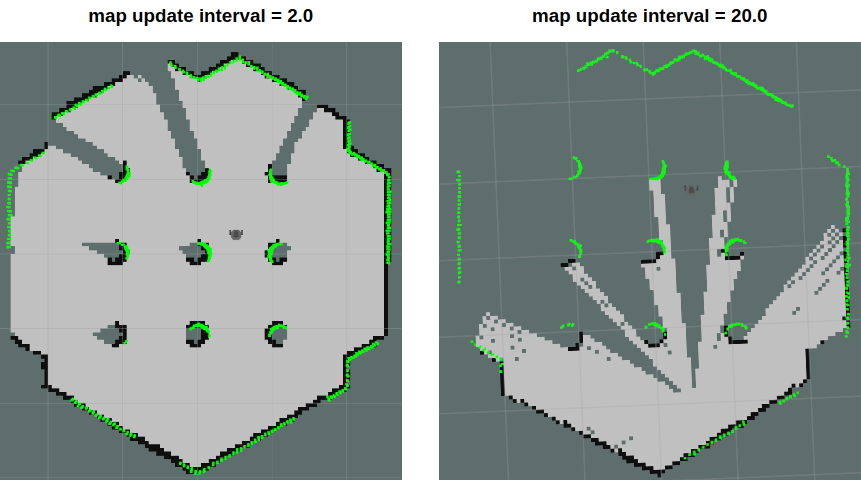
slam mapping not spliced well, help! ROS Answers: Open Source
Source : answers.ros.org
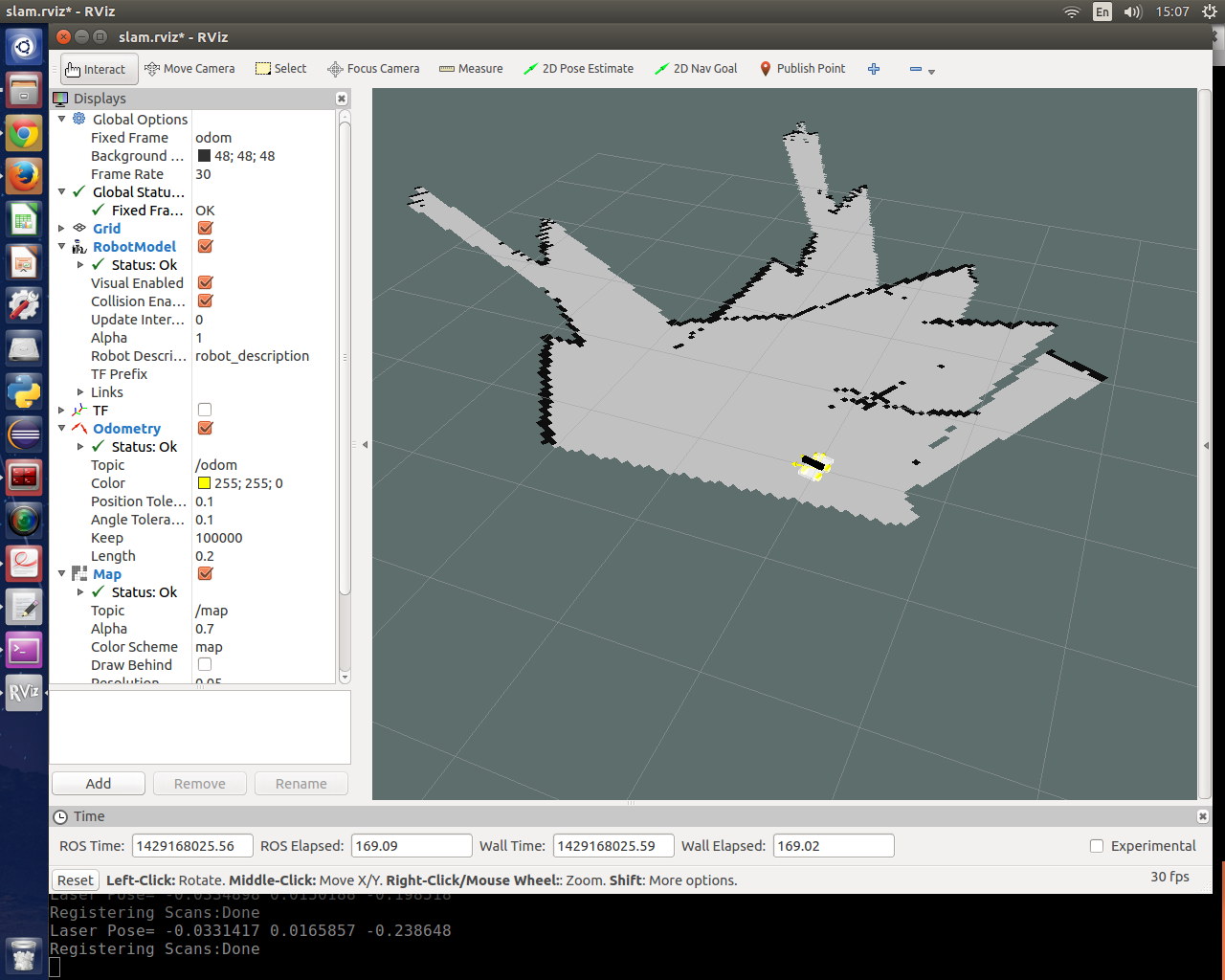
TurtleBot3
Source : emanual.robotis.com
ROS Autonomous SLAM using Rapidly Exploring Random Tree (RRT) | by
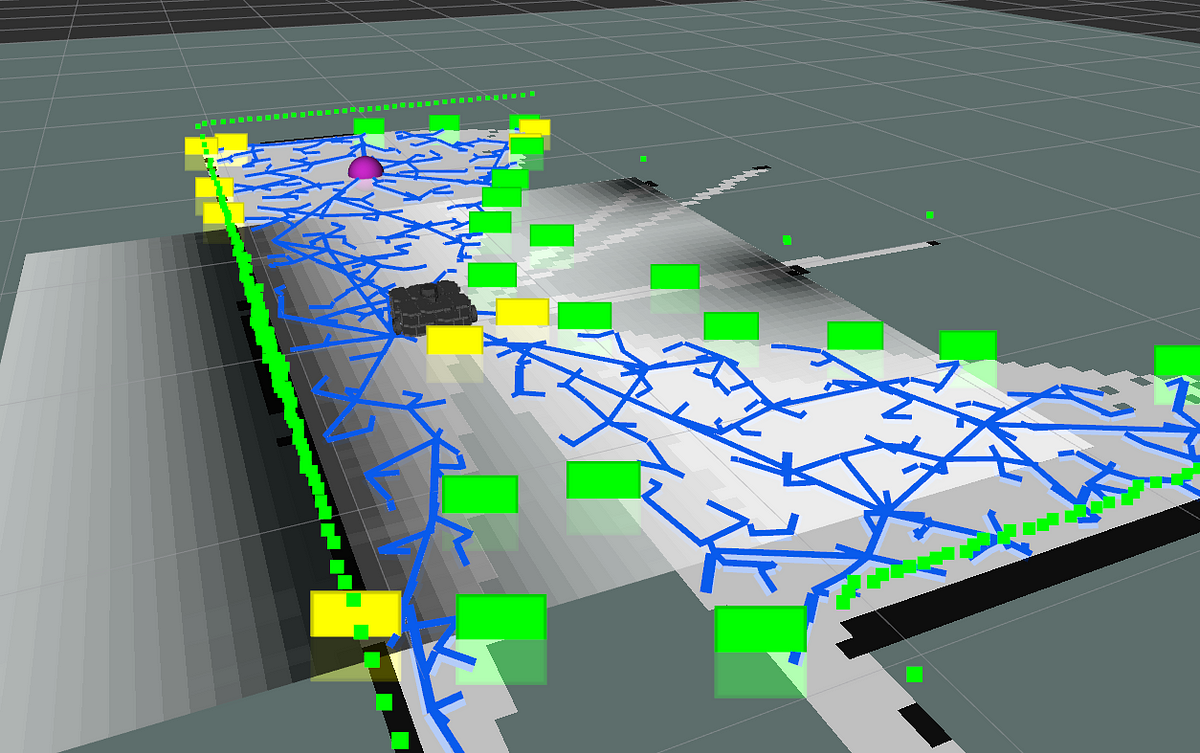
Source : towardsdatascience.com
ROS based SLAM simulation in Gazebo for the indoor environment 3D

Source : www.researchgate.net
Simultaneous Localization and Mapping (SLAM) in ROS using LAGO

Source : www.youtube.com
Slam Mapping Ros Pinoneer slam mapping issue ROS Answers: Open Source Q&A Forum: It uses the robot operating system (ROS) for map visualization and communication with the microcomputer. The SLAM algorithm used is the Rao-Blackwellized Particle Filter (FastSLAM), which combines . Through robot operating system (ROS)-based simulation and physical paving the way for advanced SLAM mapping and autonomous navigation in diverse and challenging terrains. .